



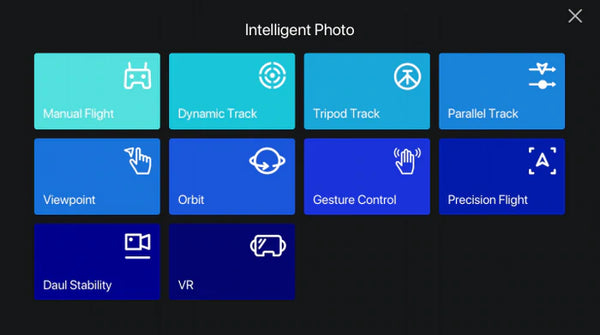
Autel EVO II comportait Dynamic Track 2.0 amélioré par l'IA qui utilise des algorithmes d'apprentissage en profondeur pour suivre automatiquement le sujet sélectionné tout en évitant les obstacles pendant le vol avec un système de vision par ordinateur avancé.
En mode de suivi dynamique, EVO II est capable d'identifier et suivre jusqu'à 64 objets six types de sujets. Par exemple, piéton, cycliste, voiture, camion, bateau ou animal.
Aussi, venez avec 3 modes de piste dynamiques : derrière, côte à côte ou piste de trépied, cela rend l'EVO II plus avancé que la plupart des drones du marché.
Autel EVO II Flight Mode
Relater: Modes de vol du drone EVO II
3 modes de piste dynamiques
1. Suivi dynamique (par défaut) - Distance fixe derrière la cible
Le drone EVO II suit automatiquement la cible à une distance fixe.
L'EVO II tentera de maintenir le vol derrière la cible. Si la cible s'arrête de bouger, l'avion plane jusqu'à ce que la cible recommence à bouger.
Dynamic Track vous permet de mettre en surbrillance et de marquer des objets en mouvement à l'aide de l'appareil mobile. Une fois marqué et l'opération commencée, l'avion suivra l'objet pendant qu'il se déplace. L'avion survolera et contournera automatiquement les objets tout en maintenant la trace de l'objet.
2. Voie parallèle - distance fixe côte à côte
EVO II suit la cible de côté à une distance relativement fixe.
La piste parallèle est similaire à la piste dynamique. La trajectoire de vol de l'aéronef restera parallèle à la trajectoire cible. Si l'avion commence le suivi alors qu'il se trouve du côté de la cible, l'avion restera dans la même position lors du suivi. Les types de reconnaissance de cible, de sélection de cible, de démarrage, etc. sont compatibles avec le suivi dynamique.

La piste parallèle suit la cible depuis le côté à une distance relativement fixe
3. Piste de trépied
EVO II plane et change continuellement sa direction et son pas de cardan pour garder le nez et la caméra pointés vers la cible.
La piste de trépied est similaire à la piste dynamique, la seule différence est que le drone sera dans un état de vol stationnaire, dont la position ne peut être réglée que par la télécommande, en ajustant la direction de vol de l'avion et l'angle du cardan. Cette fonction est applicable pour une cible en mouvement alternatif dans une petite plage.