



Autel EVO II bevatte AI-verbeterde Dynamic Track 2.0 die deep learning-algoritmen gebruikt om het geselecteerde onderwerp automatisch te volgen en obstakels tijdens de vlucht te vermijden met een geavanceerd computervisiesysteem.
In de dynamische trackmodus kan de EVO II identificeren en volg tot 64 objecten zes soorten onderwerpen. Bijvoorbeeld voetganger, fietser, auto, vrachtwagen, boot of dier.
Kom ook mee 3 dynamische spoormodi: spoor achter, naast elkaar of op statief, het maakt de EVO II geavanceerder dan de meeste drones op de markt.
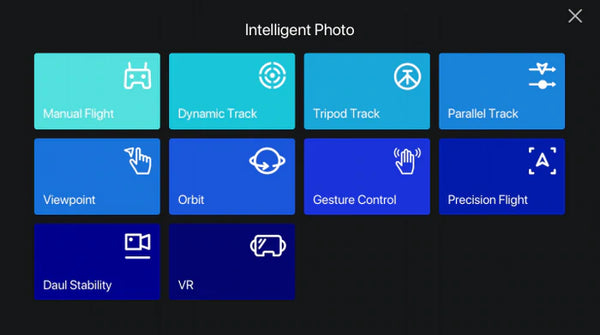
Autel EVO II Vluchtmodus
Betrekking hebben: EVO II Drone-vluchtmodi
3 dynamische spoormodi
1. Dynamisch spoor (standaard) - Vaste afstand achter het doel
EVO II Drone volgt het doel automatisch op een vaste afstand.
De EVO II zal proberen de vlucht achter het doel te behouden. Als het doel stopt met bewegen, blijft het vliegtuig zweven totdat het doel weer begint te bewegen.
Met Dynamic Track kunt u bewegende objecten markeren en markeren met behulp van het mobiele apparaat. Eenmaal gemarkeerd en de operatie is gestart, zal het vliegtuig het object volgen terwijl het beweegt. Het vliegtuig zal automatisch over en rond objecten vliegen terwijl het het object blijft volgen.
2. Parallel spoor - vaste afstand naast elkaar
EVO II volgt het doel vanaf de zijkant op een relatief vaste afstand.
Het parallelle spoor is vergelijkbaar met het dynamische spoor. Het vliegtraject van het vliegtuig blijft evenwijdig aan het doeltraject. Als het vliegtuig begint te volgen terwijl het zich aan de zijkant van het doel bevindt, blijft het vliegtuig tijdens het volgen in dezelfde positie. De soorten doelherkenning, doelselectie, opstarten, enz. consistent zijn met de dynamische tracking.

Het parallelle spoor volgt het doel vanaf de zijkant op een relatief vaste afstand
3. Statiefspoor
EVO II zweeft en verandert continu van richting en cardanische toonhoogte om de neus en camera op het doel gericht te houden.
Statiefspoor is vergelijkbaar met dynamisch spoor, het enige verschil is dat de drone zich in een stationaire zweeftoestand bevindt, waarvan de positie alleen kan worden ingesteld door de afstandsbediening, door de vliegrichting en de gimbalhoek van het vliegtuig aan te passen. Deze functie is van toepassing op een doel dat heen en weer beweegt in een klein bereik.