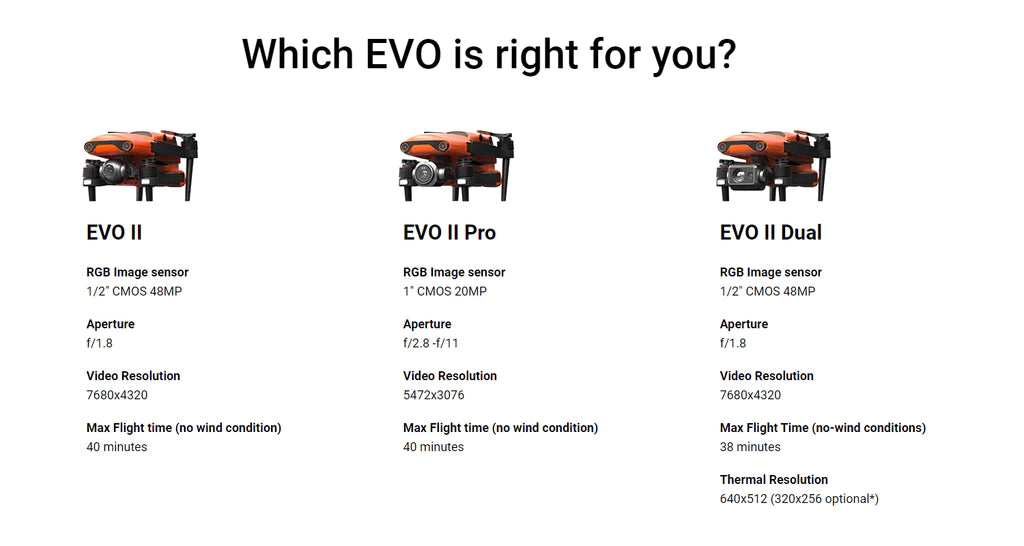




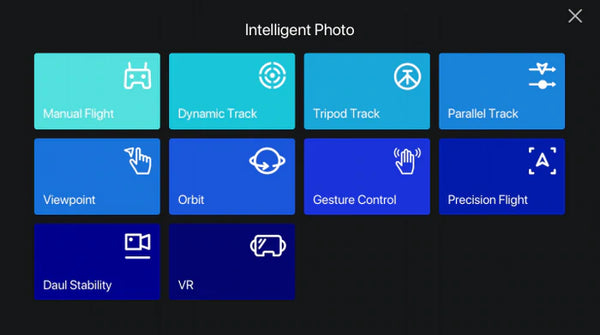
В Autel EVO II реализована технология Dynamic Track 2.0 с улучшенным ИИ, которая использует алгоритмы глубокого обучения для автоматического отслеживания выбранного объекта, избегая препятствий во время полета с помощью усовершенствованной системы компьютерного зрения.
В режиме динамического трека EVO II может идентифицировать и отслеживание до 64 объектов шесть типов объектов. Например, пешеход, велосипедист, автомобиль, грузовик, лодка или животное.
Кроме того, пойдем с 3 режима динамического отслеживания: позади, рядом или на штативе, это делает EVO II более продвинутым, чем большинство дронов на рынке.
Режим полета Autel EVO II
Относятся: Режимы полета дрона EVO II
3 режима динамической дорожки
1. Динамический трек (по умолчанию) — фиксированное расстояние за целью
EVO II Drone автоматически отслеживает цель на фиксированном расстоянии.
EVO II попытается продолжить полет позади цели. Если цель перестает двигаться, дрон зависает до тех пор, пока цель снова не начнет движение.
Dynamic Track позволяет выделять и отмечать движущиеся объекты с помощью мобильного устройства. После маркировки и начала операции дрон будет отслеживать движение объекта. Дрон будет автоматически летать над объектами и вокруг них, сохраняя при этом отслеживание объекта.
2. Параллельная дорожка — бок о бок на фиксированном расстоянии
EVO II отслеживает цель сбоку на относительно фиксированном расстоянии.
Параллельная дорожка аналогична динамической дорожке. Траектория полета самолета останется параллельной траектории цели. Если дрон начинает отслеживать, находясь сбоку от цели, дрон останется в том же положении при отслеживании. Типы распознавания цели, выбора цели, запуска и т.д. соответствуют динамическому отслеживанию.

Параллельный трек сопровождает цель сбоку на относительно фиксированном расстоянии.
3. Трек штатива
EVO II зависает и постоянно меняет свое направление и шаг подвеса, чтобы нос и камера были направлены на цель.
Отслеживание штатива похоже на динамическое отслеживание, с той лишь разницей, что дрон будет находиться в стационарном состоянии зависания, положение которого можно установить только с помощью пульта дистанционного управления, регулируя направление полета дрона и угол подвеса. Эта функция применима для цели, совершающей возвратно-поступательное движение в небольшом диапазоне.